UAVs "Thinking" and Making Decisions
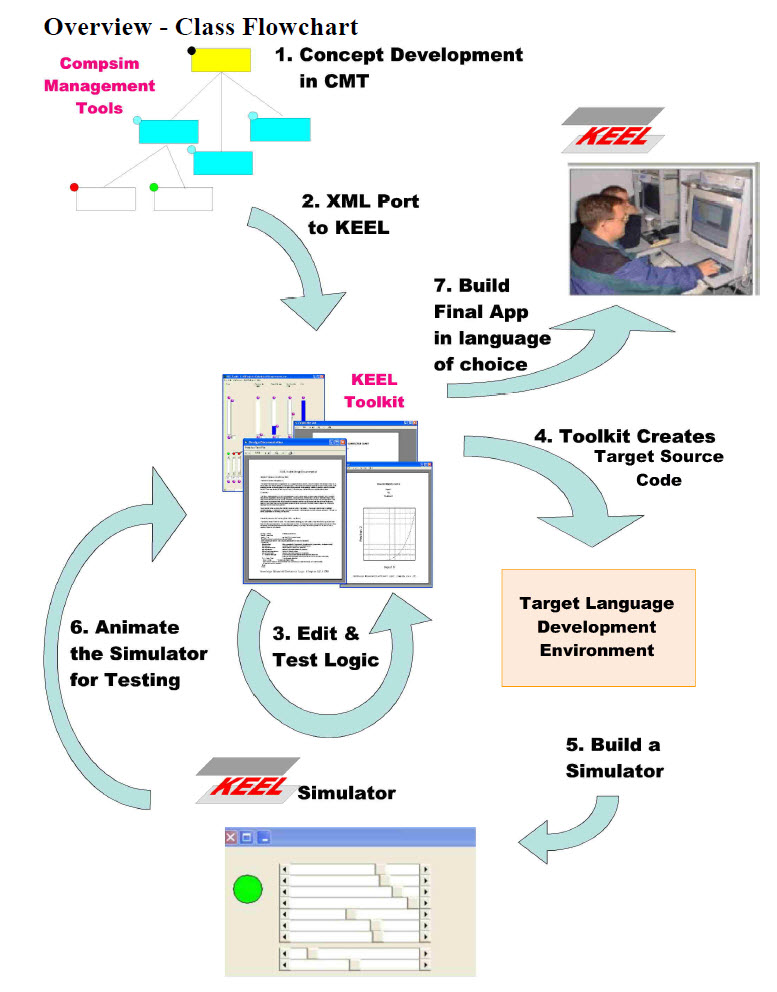
Helena Keeley , United States We created (and patented) a new way to process data and make decisions. But, often people weren't able to completely understand how it worked and how it could be utilized just by reading about it (i.e. papers, application notes, etc). So, we had to think about how we could dynamically "show" how it works. As a result, we created the UAV demo on our website. Since that demo was posted, we posted many more interactive demos to show how KEEL Technology can be used in many different types of applications.
We created (and patented) a new way to process data and make decisions. But, often people weren't able to completely understand how it worked and how it could be utilized just by reading about it (i.e. papers, application notes, etc). So, we had to think about how we could dynamically "show" how it works. As a result, we created the UAV demo on our website. Since that demo was posted, we posted many more interactive demos to show how KEEL Technology can be used in many different types of applications.Helena Keeley is the CEO of Compsim and has experience in aircraft simulation, robotics and vision systems, industrial automation, electronic data interchange, and data security with major corporations, in addition to a variety of application areas associated with KEEL Technology. Degree= BSE (EE)
Thomas Keeley is the president and founder of Compsim and the inventor of KEEL Technology. His background includes work in submarine / missile systems, digital wireless communications, cellular communications, industrial robotics, intelligent sensors, industrial automation, medical systems, and military information fusion systems. Degree= BSE (EE)
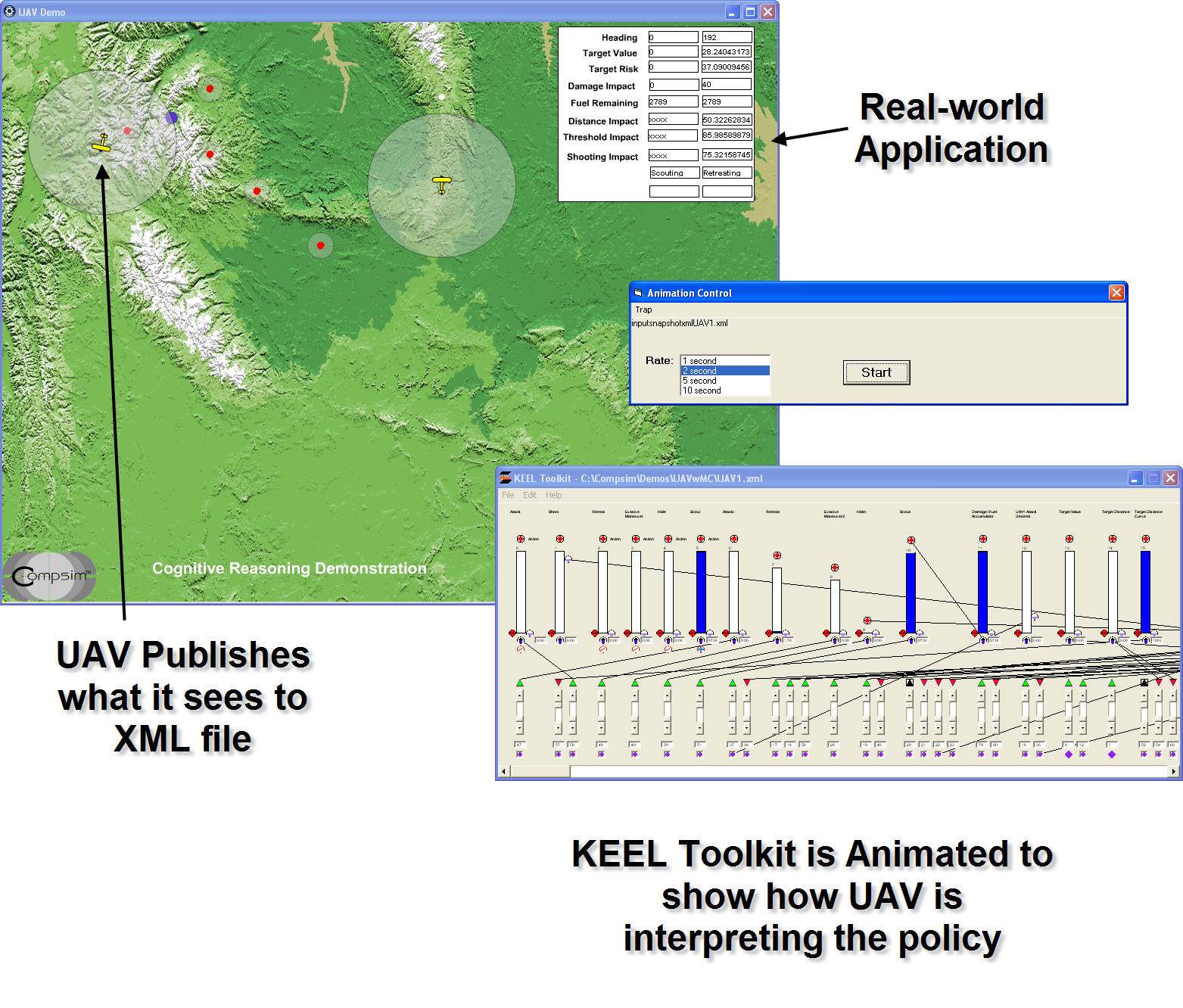
We have created an interactive demo to “show” how two Unmanned Aerial Vehicles (AUVs) can fly around and process data in order to make “grey” types of decisions. [This behavior can be embedded in a microprocessor controlling a real UAV.] The demo is located on the Compsim website: (http://www.compsim.com/ - choose "Demos" on the left - Demo #1).
The demo is interactive. If you left click, one of the unmanned airplanes flies towards where you clicked, and if you shift/left click, the other airplane flies to that point. We have incorporated a simple, 2d collision-detection in the demo, too.
The planes independently fly around and decide where to go, and what to do. Things that influence their behavior are: the risk/reward level of the plane versus the value of the target (larger red circle). Involved in this analysis is the detected target value, the associated risk of attacking it, other threats nearby, the amount of fuel remaining, the amount of accumulated damage (accumulated from defensive sites (the smaller red dots)), and considerations on how to interpret information provided by the commanders on the ground via the mission control adjustment. The UAVs see the target when the outer white circle (around each UAV) touches the target. At that point they evaluate the target. If it is “worthy”, they begin attacking. They shoot when they balance risk and reward again at the optimal instant. If there are nearby threats that influence the decision, they will try to find another approach. The decision-making model also incorporates human-like frustration, so after the UAV attempts to find a safe way to attack, it will eventually give up and go home.
Next Story »