Improved Kirgami Snake-Bot Slithers Better
 Apr-24-19
A newly improved snake-inspired soft robot powered by origami is both faster and more precise than its predecessor.
Apr-24-19
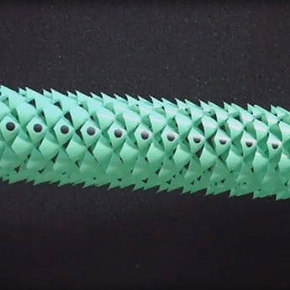
A newly improved snake-inspired soft robot powered by origami is both faster and more precise than its predecessor.Developed by a team from Harvard, the original snake robot was made up of a flat kirigami sheet that was wrapped around an elastomer actuator. When the robot was stretched, its scales would extend to propel it forward.
To give the robot more speed, the team rolled the kirigami sheet into a cylinder with an actuator at both ends and altered the size of the cuts. This allowed the team to control the way the cuts popped up, such as moving along the length of the bot or deforming in a particular sequence. In races against the earlier snake bot, the team noted that robots with pop-ups that deform at either end before propagating from the rear and back were the fastest examples of the design. According to the paper’s senior author, Katia Bertoldi, "By simply combining cuts and curvature, we can program remarkably different behavior."
More Info about this Invention:
[GEEK.COM][SEAS. HARVARD.EDU]
Add Your Comment