Inverse Kinematics
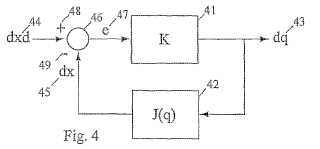
A real-time method for controlling a system, the system including a plurality of controlling means each having at least one variable parameter (q) and a controlled element having a trajectory which is controlled by the controlling means, wherein the trajectory is related to the variable parameters by a variable matrix, the method comprising defining a control transfer matrix (K) relating the variable parameters d q to the trajectory dx, and using a feedback loop in which a feedback term is computed that is dependent on an error (e) which is the difference between the desired trajectory (dxd) which can have an arbitrary dimension specified as (m) and a current trajectory (dx).Attached files:
Patents:
CA 2,735,262
Inventor(s): PECHEV ALEXANDRE NIKOLOV [GB]
Type of Offer: Sale
« More Mathematics Patents