Drill Hole Planning
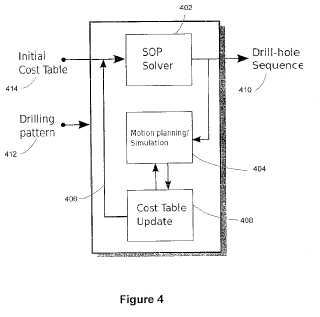
Forming a sequence plan for a machine to travel to a series of specified locations is described. An initial cost table (414) and a pattern of locations (412) is inputted to a Sequential Ordering Problem (SOP) solver (402). The resulting sequence (410) is processed by a motion planner (404) to derive by a motion planning procedure a plan of machine motions through the sequence. A cost table update (408) is performed based on the motion plan, which is then used for another iteration of the SOP solver (402).Attached files:
Patents:
WO 2,010,118,470
Inventor(s): ELINAS PANTELIS [AU]; SINGH SURYA P N [AU]
Type of Offer: Sale
« More Engineering - Industrial Patents