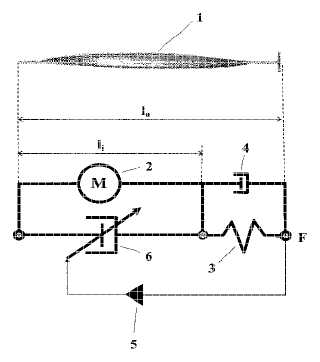
For Natural muscle's movement behavior simulation device for e.g. robot arm, has mechanical energy source arranged parallel to damping member, where damping member regulates force delivered by device
The device has a mechanical energy source (2) and an elastic element e.g. mechanical tension spring (3), arranged in series. The mechanical energy source is arranged parallel to a damping member (6) e.g. magneto-rheological damper and hydro-pneumatic suspension system, that regulates force (5) delivered by the device to a load. The mechanical energy source comprises electromechanical, hydraulic or pneumatic drive, electric motor, a drive using metal hydride as a working medium, a drive using shape memory alloy as a working medium, or a drive using organic materials as a working medium.Attached files:
Patents:
DE 102,008,058,604
Inventor(s): BLICKHAN REINHARD [DE]; GUENTHER MICHAEL [DE]; SCHMITT SYN [DE]
Type of Offer: Sale
« More Engineering - Mechanical Patents