Robotic Grippers Cushioned by Magnetic Resistance
 Sep-14-19
A pair of robotic grippers gets a useful soft touch with the help of shock-absorbing magnets.
Sep-14-19
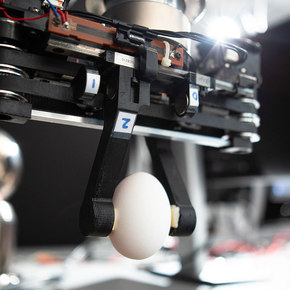
A pair of robotic grippers gets a useful soft touch with the help of shock-absorbing magnets.The grippers feature a pair of ‘fingers’ each mounted on a magnetic base located between a pair of repulsive neodymium magnets that push on the base without making contact. This lack of contact creates an air gap between the base and the magnet that absorbs shocks to properly adjust the stiffness of the grip. The system can also protect the object is has picked up, detecting external forces to quickly adjust its grip and prevent the item from being damaged.
According to Assoc. Prof. Ehsan Esfahani, "These grippers are designed for collaborative robots that work together with people. They’re going to be helpers, so they need to be safe, and variable stiffness grippers help to achieve that goal."
Add Your Comment