Self-propelled tilling device e.g. robot, navigating method, involves determining driving direction by evaluating determined vectors and by controlling distance to preceding tracks, and forming meande
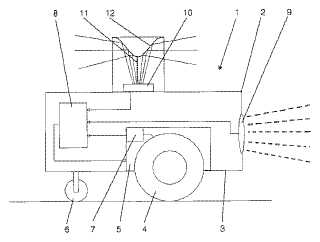
The method involves capturing surrounding images e.g. 360 degree panorama image, in track points by a camera module (10). Vectors from actual track points to two preceding track points are determined by comparing the surrounding images of the actual track points with the surrounding images of the two preceding track points by a controller (8). A driving direction is determined by evaluating the vectors and by controlling a distance to preceding tracks by the controller, and a meander or spiral shaped preset track is formed.Attached files:
Patents:
DE 102,007,016,802
Inventor(s): GERSTMAYR LORENZ [DE]; KREFT SVEN [DE]; MOELLER RALF [DE]; ROEBEN FRANK [DE]
Type of Offer: Sale
« More Optical Science Patents