Soft-Bodied UrchinBot is Powered by Pneumatics
 Nov-09-19
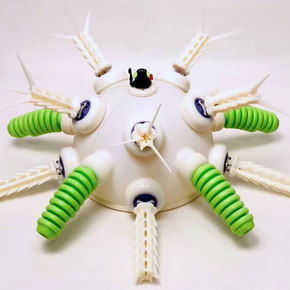
Inspired by the locomotion of juvenile urchins, the odd-looking UrchinBot could be used for underwater exploration and ocean cleanup.
Nov-09-19
Inspired by the locomotion of juvenile urchins, the odd-looking UrchinBot could be used for underwater exploration and ocean cleanup.Developed by a team from, MIT, the UrchinBot is equipped with five flexible ‘tube feet’ and ten rigid spines connected to the bot’s body with a ball joint. Pneumatic domes surrounding the joint can push the spines against a solid surface, which will cause the UrchinBot to pivot in the opposite direction, while the tube feet are equipped with magnets that can extend to ‘grip’ a ferrous material and inflate to pull the bot forward or back.
The researchers believe the novel robot could be useful for cleaning and inspecting heavily fouled areas that could be a challenge for standard robots.
More Info about this Invention:
[INCEPTIVEMIND.COM][SPECTRUM.IEEE]
Add Your Comment