Vacuum Gripper for Picking Up and Setting Down Unit Loads
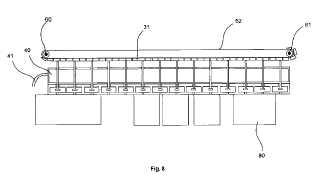
The invention relates to a vacuum gripper for picking up and sequentially setting down unit loads (80) layer by layer, comprising a suction surface (20) having a plurality of suction openings (21), which are connected to a vacuum supply, and an actuating device (30) for temporarily connecting the suction openings (21) to said vacuum supply. The invention is characterized in that the vacuum gripper (10; 10') comprises at least two air channels (22), each connecting a plurality of suction openings (21) to each other, wherein each air channel (22) is connected by way of at least one valve to a central, linear vacuum supply channel (40), which is connected to the vacuum supply. The at least one valve comprises at least one tappet (50), the movement of which makes it possible to control the opening and closing of the valve, wherein means are provided for automatically moving the tappets (50) in a position in which the related valve is closed, and the tappets (50) are arranged in a straight tappet row. To actuate the tappets (50), the tappets (50) are functionally connected to a mechanical actuating device (30), which extends along the tappet row and comprises mechanically movable control elements (31; 31') for the sequential actuation of the tappets (50). The control elements (31; 31') are designed to consecutively actuate the means for automatically restoring the tappets (50) to a position in which the related valve is closed, making it possible to close the related valves one after the other along the tappet row.Attached files:
Patents:
DE 102,009,043,043
Inventor(s): SCHMIDT KOLJA [DE]; ECHELMEYER WOLFGANG [DE]; FRANCK HERMANN [DE]
Type of Offer: Sale
« More Engineering - Industrial Patents